
Signaux et capteurs Arduino en Seconde
Acquis du Collège
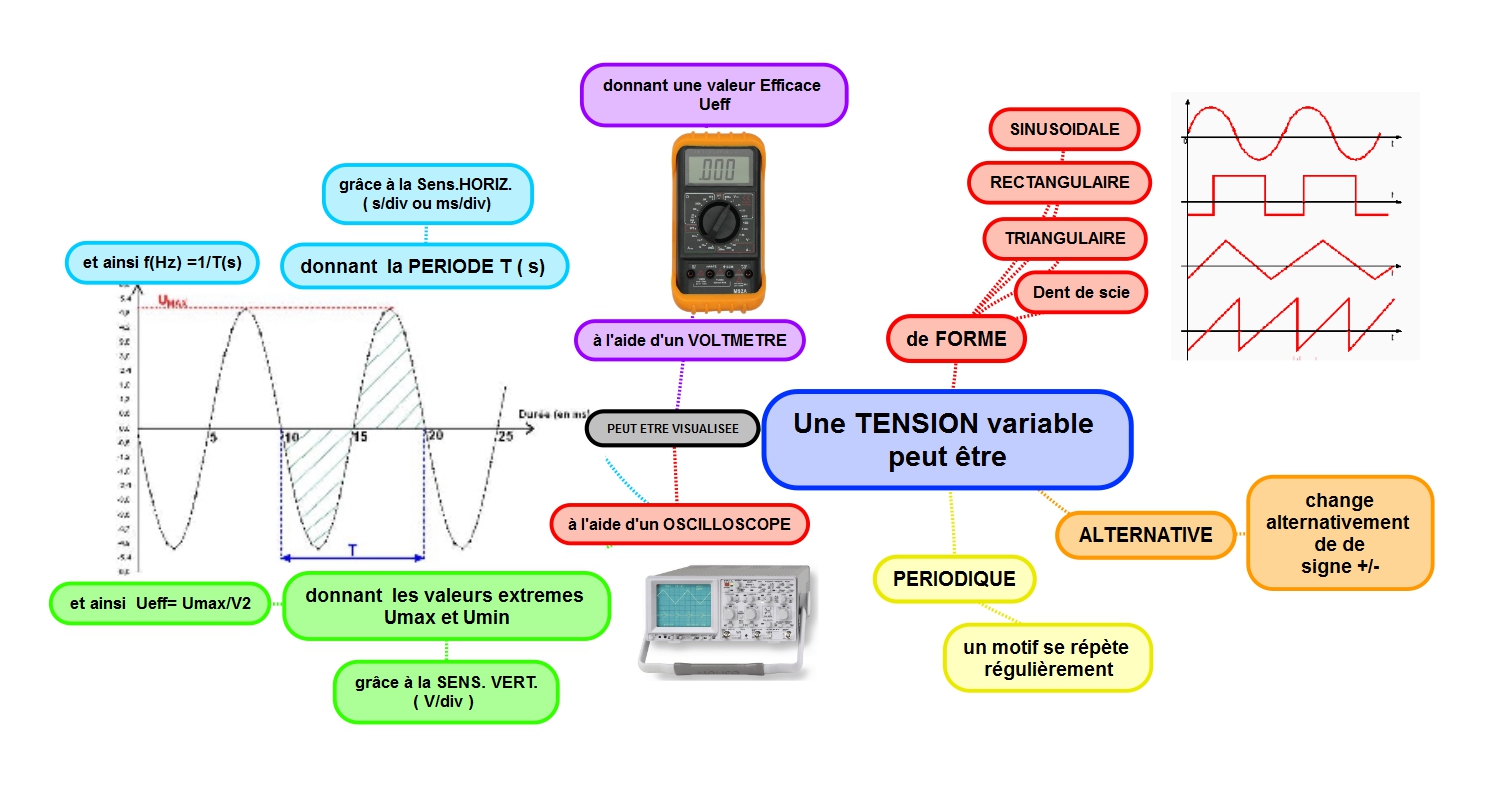




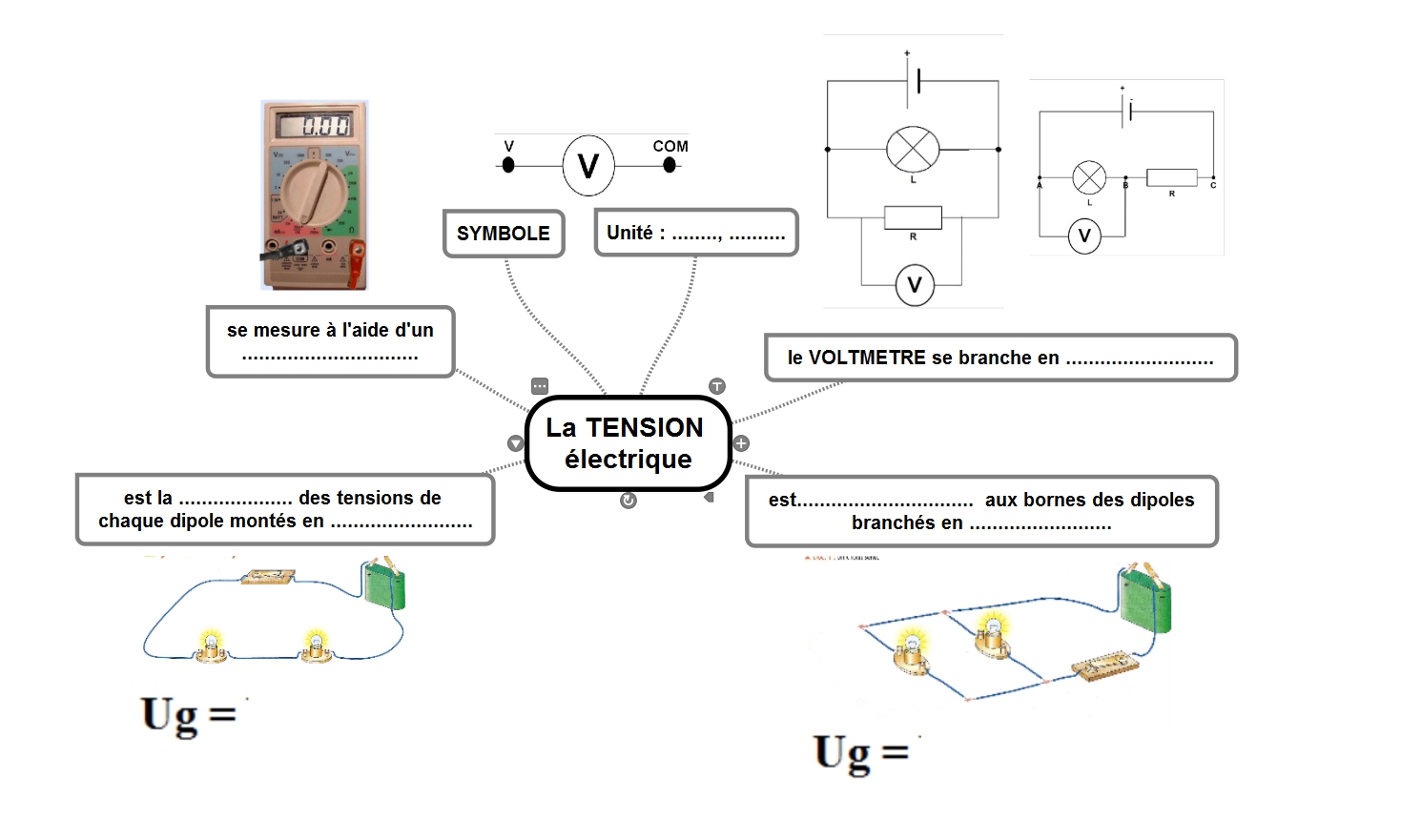








Tension et intensité
Ex : 17,20,23,27 p 315
S'exercer à tracer une caractéristique


Version DEBUTANT









Quelques ressources
Comprendre les lois sur les intensités
http://ekladata.com/Nj7Bf6GryzIEQyjFNvEdtGIY29g/exercice1-intensite-SERIE.swf
http://ekladata.com/2dZn8SdjWWVTUMcuUrHXwgTmauM/exercice2-intensite-DERIVATION.swf
Comprendre les lois des tensions
http://ekladata.com/Yu20i2hGxBkGTUbmR4ksXqwE_s4/exercice3tension-serrie-et-derivation.swf
http://ekladata.com/2-ShWB98R0enKnsvV1ACKxFzn8s/exercice4tension-serei-et-derivation-2.swf
Micro-contrôleur ARDUINO et capteurs

Le microcontroleur

Sa découverte

Les IDE
Connection Bluetooth
Vituino

Bluetooth electronics Apps

Les capteurs et actionneurs

Capteurs électriques..

La Conversion Analogique Numérique CAN
Programmation et Simulation

Cicuit.IO

Fritzing


Les librairies
18 Projets-Défis Arduino en Seconde

Séquences permettant de construire des Projets-Défis
Projet 1 :Variateur de lumière en fonction de l'ensoleillement
Objectif : " L'intensité lumineuse d'une LED doit varier en fonction de la lumière captée par une photorésistance LDR"
Composants spécifiques :
- LED
- LDR
Fonctions spécifiques vues :
If else
println
Extensions possibles :
La couleur d’une Del RGB pourrait varier en fonction de l’éclairement

CLIQUER sur l'ICONE pour afficher plein ECRAN

Projet 2 : Détecteur d'incendie
Objectif
: " Une LED s'allume lorsque la température dépasse un seuil "
Composants spécifiques :
-
capteur de
température TMP36
Fonctions spécifiques vues :
Extensions possibles :
Un ventilateur s'active ou un buzzeur se met en marche !

Alimentation: 2,7 à 5,5 Vcc
Plage de mesure: -40°C à +125°C
Précision: ±1°C
Conversion: 10 mV/°C
Tension à 25°C: 750 mV
Tension d'offset: 0,5 Vcc
Projet 3 :Fermeture du volet lorsqu'il fait froid !
Objectif
: " La position du volet varie ( tout ou rien ) en fonction de la température captée par un capteur de température"
Composants spécifiques :
-
Servomoteur
micro
-
TMP36 : capteur
de température
Fonctions spécifiques vues :
mainServo.attach(3);
float
map(tempC, 0, 50, 0, 180)
Extensions possibles :
La
position des volets pourrait varier en continue avec la température ou avec la lumière en remplaçant le capteur de température avec une photorésistance !
Un microrupteur peut être ajouté pour stopper la descente des volets

Alimentation: 2,7 à 5,5 Vcc
Plage de mesure: -40°C à +125°C
Précision: ±1°C
Conversion: 10 mV/°C
Tension à 25°C: 750 mV
Tension d'offset: 0,5 Vcc

Projet 4 : Passage à niveau
Objectif
: " Le passage à niveau est fermé : la barrière est levé , le piéton appuie sur le bouton, la barrière s'abaisse, le feu passe au vert, "
Composants spécifiques :
- Servomoteur micro
Fonctions spécifiques vues :
mainServo.attach(9);


Projet 5 : Détecteur de flamme
Objectif : "Alerte au feu"
Composants spécifiques :
Détecteur de flamme KY -026
Moniteur ou LED
Fonctions spécifiques vues :
Extensions possibles :
La valeur de la température est affichée ou une pompe se met en route !
Le code....
int led = 13;
int digitalPin = 2; // KY-026 signal digital
int analogPin = A0; // KY-026 signal analog
int digitalVal;
int analogVal;
void setup()
{
pinMode(led, OUTPUT);
pinMode(digitalPin, INPUT);
Serial.begin(9600);
}
void loop()
{
// Lecture et affectation du signal ANALOGIQUE du capteur
digitalVal = digitalRead(digitalPin);
// Test si le signal digital est HAUT
if(digitalVal == HIGH)
// allume ou éteint la DEL
{
digitalWrite(led, HIGH);
}
else
{
digitalWrite(led, LOW);
}
// Lecture et affectation du signal NUMERIQUE du capteur
analogVal = analogRead(analogPin);
Serial.println(analogVal);
delay(100);
}

Spécifications de montage :
Ao= Signal Analogique
Do= Signal Numérique
Gnd : Ground ( Masse )
Vcc = Alim +3.3V à +5.5V
Angle de détection : 60 °
Longueur d'onde : 760 nm à 1100 nm ( IR )

Projet 6 : Détecteur à LED d'humidité du sol
Objectif : "Indicateur à LED du niveau d'eau dans une plante "
Composants spécifiques :
3 LED R,J,V
3 résistances 220 Ohm
Sonde d'humidité
Fonctions spécifiques vues :
Extensions possibles :
" Une pompe ( moteur) est activée lorsque le degré d'humidité est trop faible "



Projet 7 : Capteur de force ( poids )
Objectif : L'intensité lumineuse varie en fonction de la force exercée sur le capteur.
Composants spécifiques :
-
3
LED R,J, V
-
3
résistances 220 Ohm
- FSR 402 : Force Sensing Resistor
Fonctions spécifiques vues :
luminosite_led = map(lecture_FSR, 0, 1023, 0, 255); Extensions possibles :
" Le feu rouge passe au vert lorsque la voiture exerce un poids sur la route "
La fréquence d'un son peut varier: instrument de musique

Le CODE avec buzzer ou LED
int capteur_force = 0;// FSR branché sur pin Analog 0, AO
int buzzer = 3;// connecter le buzzer sur pin 3 (pin PWM)
int lecture_FSR; // Lecture analogique de la tension du pont diviseur du capteur FSR
int freq_buzzer ;
void setup(void) {
Serial.begin(9600);// Envoi de message de déboggage sur connexion
série
pinMode(buzzer, OUTPUT);
}
void loop(void) {
lecture_FSR = analogRead(capteur_force);
Serial.print("Capteur de Force = ");
Serial.println(lecture_FSR);
// Map convertit la valeur analogique lue (0-800)
// en une valeur utilisable par analogWrite (0,20000 Hz).
freq_buzzer = map(lecture_FSR, 0,800, 0, 20000);
// si aucune force , aucun son
// Ecrire sur le Buzzer la valeur décimal freq_buzzer (en fonction de la pression)
analogWrite(buzzer, freq_buzzer);
delay(500);
}

Plage de mesure: 100 g à 2 kg
Applications: détection de présence, d'objets ...
Durée de vie: 10 millions de cycles
Epaisseur : 0,46 mm
Dimensions: 56 x Ø19 mm

Projet 8: Arrosage en fonction du taux d'humidité
Objectif
: " Une pompe ( moteur) est activée lorsque le degré d'humidité est trop faible "
Composants spécifiques :
Fonctions spécifiques vues :
#include <dht.h>
dht DHT;
#define DHT11_PIN 7

Le code....
#include <dht.h>
#define dataPin 7 //Defini le pin auquel est relie le capteur
dht DHT; // creation de l'objet DHT
void setup() {
Serial.begin(9600);
}
void loop() {
int readData = DHT.read11(dataPin); // lit la valeur sur la sortie du capteur
float t = DHT.temperature; // obtient la valeur de la temperature
float h = DHT.humidity; // obtient la valeur de l'humidite
// Affichage des resultats sur le moniteur
Serial.print("La Temperature est de = ");
Serial.print(t);
Serial.print(" *C ");
Serial.print(" Le taux d'Humidite est = ");
Serial.print(h);
Serial.println(" % ");
delay(2000); // attente de 2 sec pour le capteur DHT11 à 0.5Hz
}

- Humidity Range: 20-90% RH
- Humidity Accuracy: ±5% RH
- Temperature Range: 0-50 °C
- Temperature Accuracy: ±2% °C
- Operating Voltage: 3V to 5.5V

Projet 9 : Niveau d'eau U.S de réservoir
Objectif
: " un signal sonore ou lumineux est activité lorsque le niveau d'eau est trop faible "
Composants spécifiques :
-
LED
ou buzzer
-
Capteur
d'US
- Afficheur LCD
Fonctions spécifiques vues :
Extensions possibles :
Le niveau est indiqué par mesure de la distance entre la surface et le capteur et une pompe peut être alors activée
La mesure du niveau peut se faire en mesurant la pression
La meure peut être envoyée par bluetooth

Tension de travail: 5V (DC)
Courant statique: Moins de 2 mA.
Signal de sortie: signal de fréquence électrique, niveau élevé 5V, faible niveau 0V.
Angle de capteur: pas plus de 15 degrés.
Distance de détection: 2cm-450cm.
Haute Précision: Jusqu'à 0.3cm
Signal de déclenchement d'entrée: impulsion 10us TTL
Echo Signal: sortie TTL Signal PWL
Mode de connexion: VCC Trig (T) Echo (R) GND
Projet 10 : Radar sonore de recul ( voiture )
Objectif
: " un signal sonore( fréquence ) ou lumineux ( clignotement ) est activité en fonction de la distance entre l'émetteur et l'obstacle"
Composants spécifiques :
-
LED
ou buzzer
-
Capteur
d'US
Fonctions spécifiques vues :
Extensions possibles :
Clignotement et continu ou bip discontinu et continu.

Projet 11 : Télémètre US
Objectif
: " La distance
entre l'émetteur et l'obstacle est affichée sur le Moniteur ou l'écran LCD "
Composants spécifiques :
-
Capteur d'US HC
SR004
- Moniteur
Fonctions spécifiques vues :
Extensions possibles :
Affichage de message " attention " si la distance est trop faible ( marge d'erreur du capteur pris alors en compte )


Projet 12 : Télémètre et Afficheur LCD
Objectif
: " La distance
entre l'émetteur et l'obstacle est affichée sur l'écran LCD "
Composants spécifiques :
-
Capteur
d'US
-
Ecran LCD
2*8
Fonctions spécifiques vues :
LiquidCrystal monEcran (RS, E, d4, d5, d6, d7);
lcd.begin(cols, rows)
Extensions possibles :
Affichage de message " attention " si la distance est trop faible ( marge d'erreur du capteur pris alors en compte )


Projet 13 : Mesure d'oscillation d'un pendule à l'aide d'un capteur de flexion



Objectif
: " La luminosité de la LED varie avec la flexion du capteur de force
"
Composants spécifiques :
-
Capteur
flex
-
LEd
Fonctions spécifiques vues :
Extensions possibles :
Un gant musical : la flexion fait varier la fréquence de la note

Capteur de flexion souple résistif.
La résistance augmente lorsque l'angle de flexion du capteur augmente. Il faut éviter de plier la base du capteur.
Résistance au repos: 25 kΩ
Tolérance: ±30 %
Variation: 45 à 125 kΩ
Puissance: 0,5 W
Durée de vie: 1 million de cycles
Dimensions: 74 x 6 x 0,43 mm
int capteur_force = 0; // FSR branché sur pin Analog 0
int led = 3; // connecter LED rouge sur pin 3 (pin PWM)
int lecture_FSR; // Lecture analogique de la tension du pont diviseur du capteur FSR
int luminosite_led;
void setup() {
Serial.begin(9600); // Envoi de message de déboggage sur connexion
série
pinMode(led, OUTPUT);
}
void loop() {
lecture_FSR = analogRead(capteur_force);
Serial.print("Capteur de Force = ");
Serial.println(lecture_FSR);
// map convertit la valeur analogique lue (0-1023)
// en une valeur utilisable par analogWrite (0-255).
luminosite_led = map(lecture_FSR, 0, 1023, 0, 255);
// Ecrire sur la lLED la valeur décimal luminosite_LED (en fonction de la pression)
analogWrite(led, luminosite_led);
delay(100);
}
Projet 14 : Gant musical
Objectif
: la flexion de chaque doigt permet d'émettre une fréquence ( note ) , l'amplitude de la flexion permet de varier l'amplitude ou vibrato ( interférence )
Composants spécifiques :
-
Capteur de
force linéaire
- buzzer
Fonctions spécifiques vues :
Extensions possibles :

Projet 15 : Détecteur de pluie avec fermeture de volet
Objectif
: " Les volets se ferment lorsque la pluie est détectée
"
Composants spécifiques :
-
Capteur de
pluie
-
Moteur ou 2,3
LED
Fonctions spécifiques vues :
Aucune
Extensions possibles : Essuie-glace

Code avec 3 LED
int valCapteur = 0;
void setup() {
Serial.begin(9600);
pinMode(10,OUTPUT);// led Verte branchée sur l entree 10
pinMode(11,OUTPUT);// led Jaune branchée sur l entree 11
pinMode(12,OUTPUT);// led Rouge branchée sur l entree 12
}
void loop() {
valCapteur =analogRead(A0);// lecture de la sortie analogique AO du capteur de pluie
Serial.println( valCapteur); // Affichage au moniteur ;
if (valCapteur < 400) // SI humide la led VERTE s'allume
{
digitalWrite(10,HIGH);
digitalWrite(11,LOW);
digitalWrite(12,LOW);
}
else if (valCapteur >= 400 && valCapteur < 800)
// si relativement sec led jaune allumée
{
digitalWrite(10,LOW);
digitalWrite(11,HIGH);
digitalWrite(12,LOW);
}
else { // si SEC led rouge allumée
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(12,HIGH);
}
delay(500);
}
Projet 16 : Capteur PIR de mouvement et alerte
Objectif
: "Une alarme sonore et visuelle se déclenche lorsqu'un mouvement est détecté
"
Composants spécifiques :
-
Capteur
Pyroélectrique InfraRouge
- LED
- Buzzer
Fonctions spécifiques vues :
Extensions possibles : Essuie-glace


Projet 17 : Fréquencemètre cardiaque
Objectif
: "Détermination
des battements cardiaques par émission IR et réception par un phototransistor au travers du doigt
"
Composants spécifiques :
-
Capteur
InfraRouge KY 039
- Moniteur
Fonctions spécifiques vues :
Extensions possibles :

Projet 18 : Détecteur IR d'obstacles
Objectif
: "Détection d'obstacles pour robot
Composants spécifiques :
-
Emetteur
InfraRouge KY 032
- Moteur
Fonctions spécifiques vues :
Extensions possibles :
http://tiptopboards.free.fr/arduino_forum/viewtopic.php?f=2&t=8
https://tkkrlab.nl/wiki/Arduino_KY-032_Obstacle_avoidance_sensor_module

Specifications
- Working voltage: DC 3.3V-5V
- Working current: I= 20mA
- Operating temperature: -10 °C à 50°C
- Distance de détection : de 2 à 40cm
- IO Interface: 4-wire interfaces (-Gnd/ +Vcc/ S / EN)
- Signal de sortie: TTL level (0 si obstacle, 1 sinon )
- Adjustment : résistance réglable
- Effective angle: 35 °
- Dim: 28mm * 23mm
PADLET RESSOURCES ARDUINO
Pinterest Perso Collection
